

Description
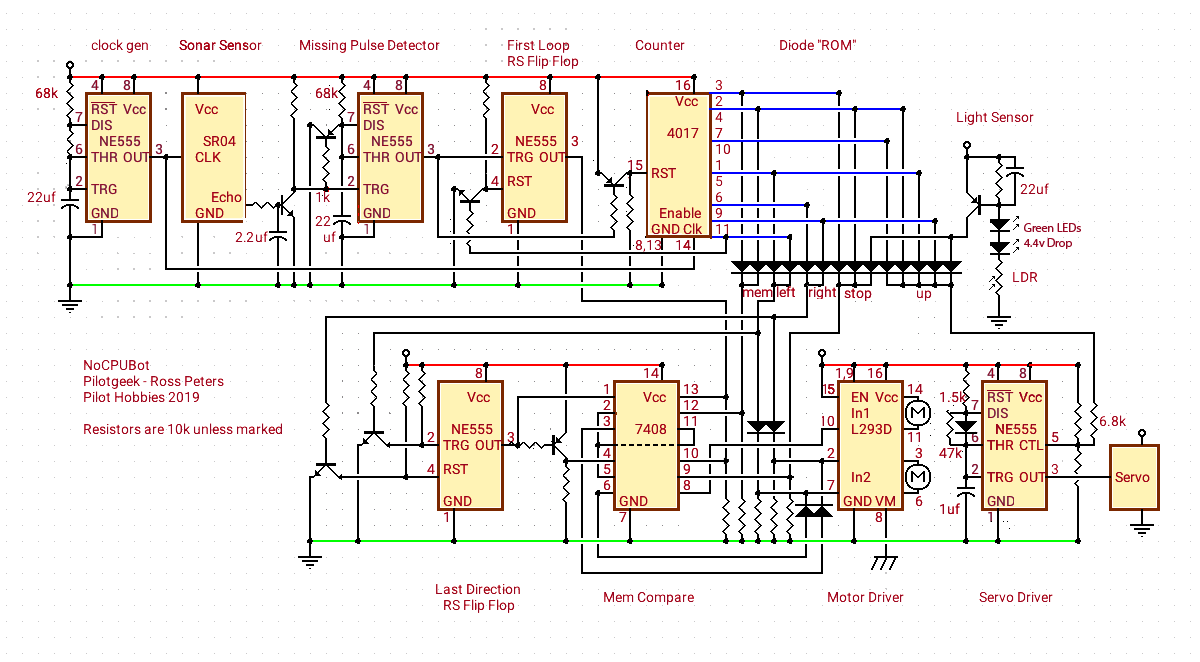
If you want to replicate the circuit shown in the video, I have a blog post detailing how it works, including schematics.
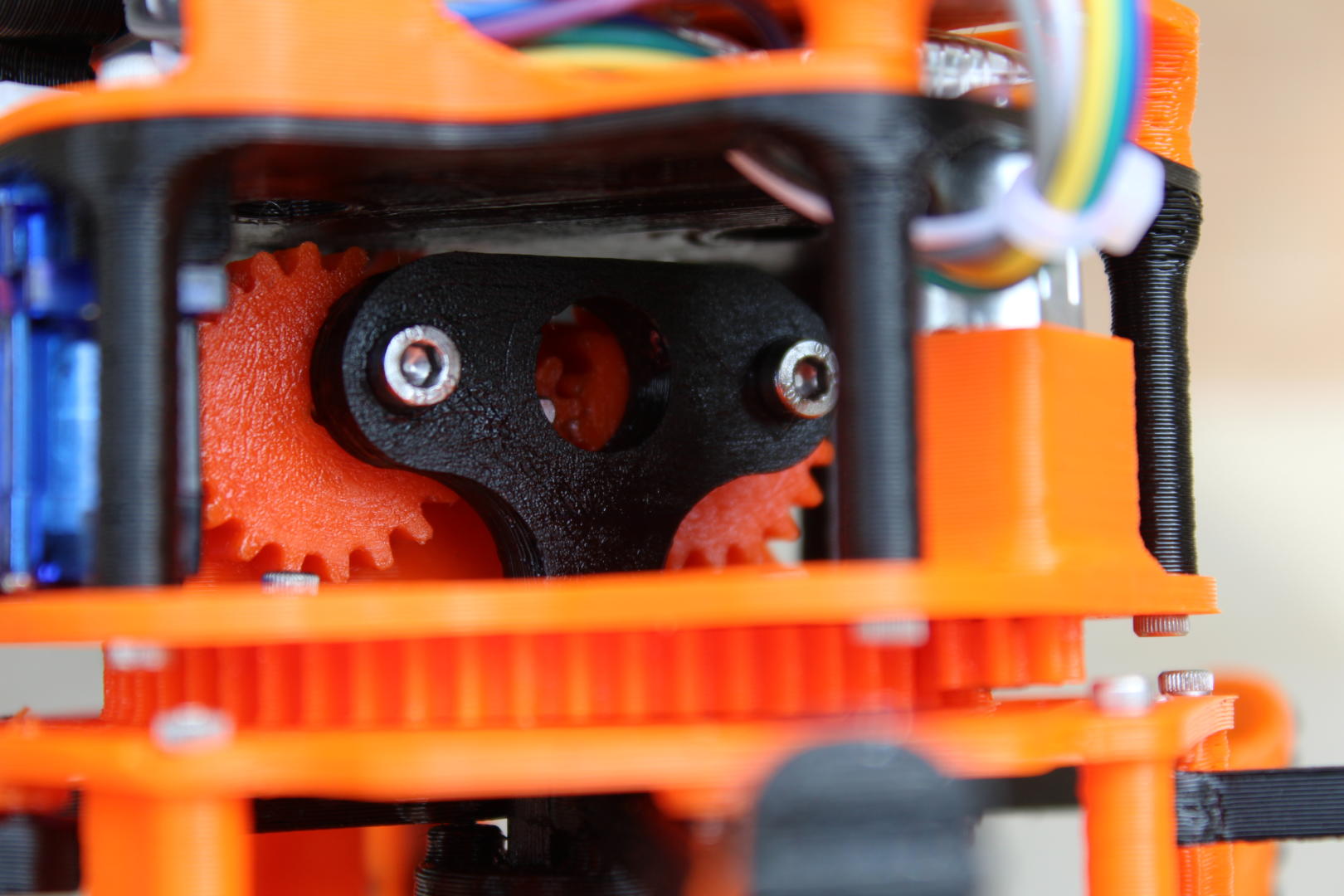
Update! R5 now includes STEP files for modification, along with adding ball bearings to the drivetrain.
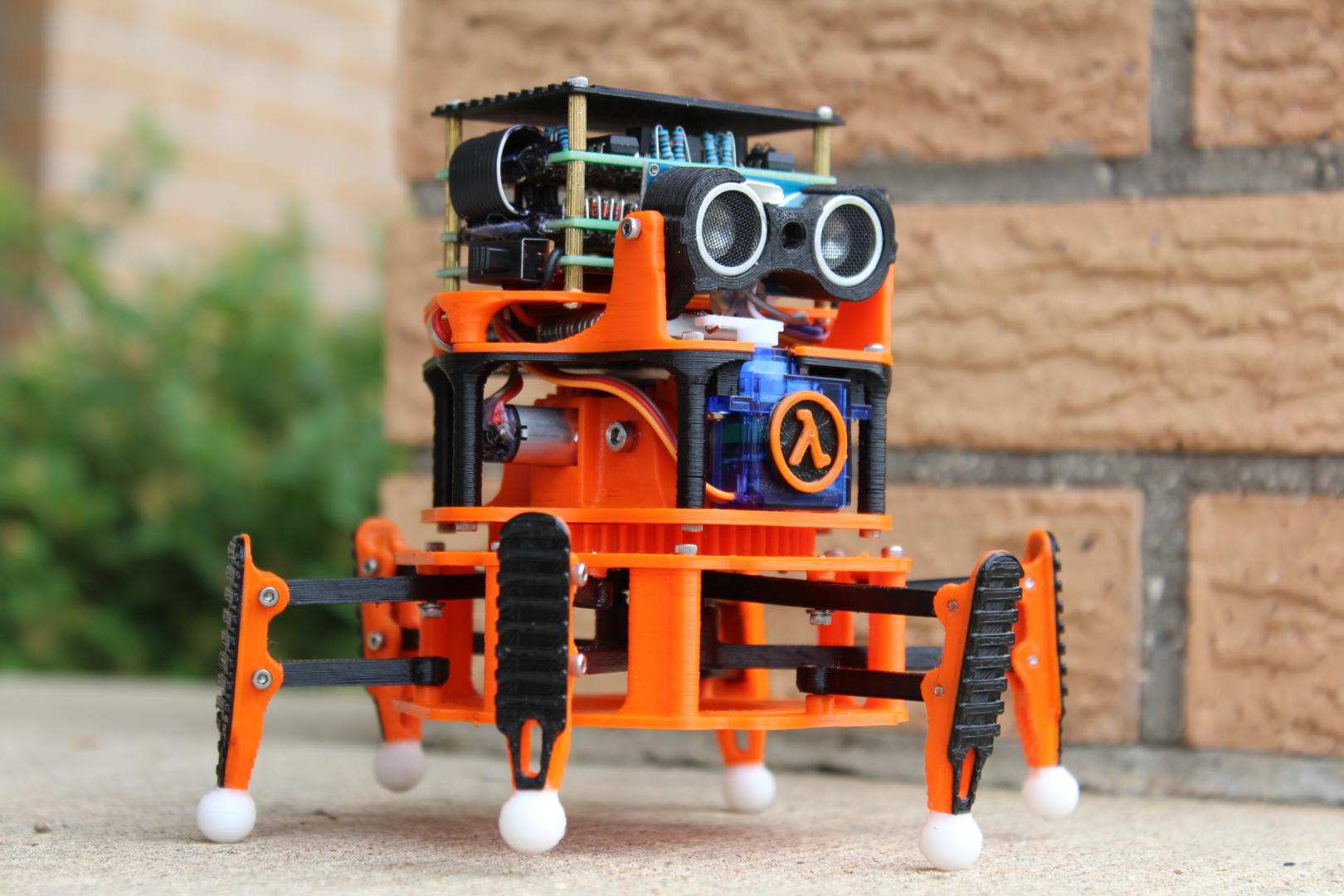
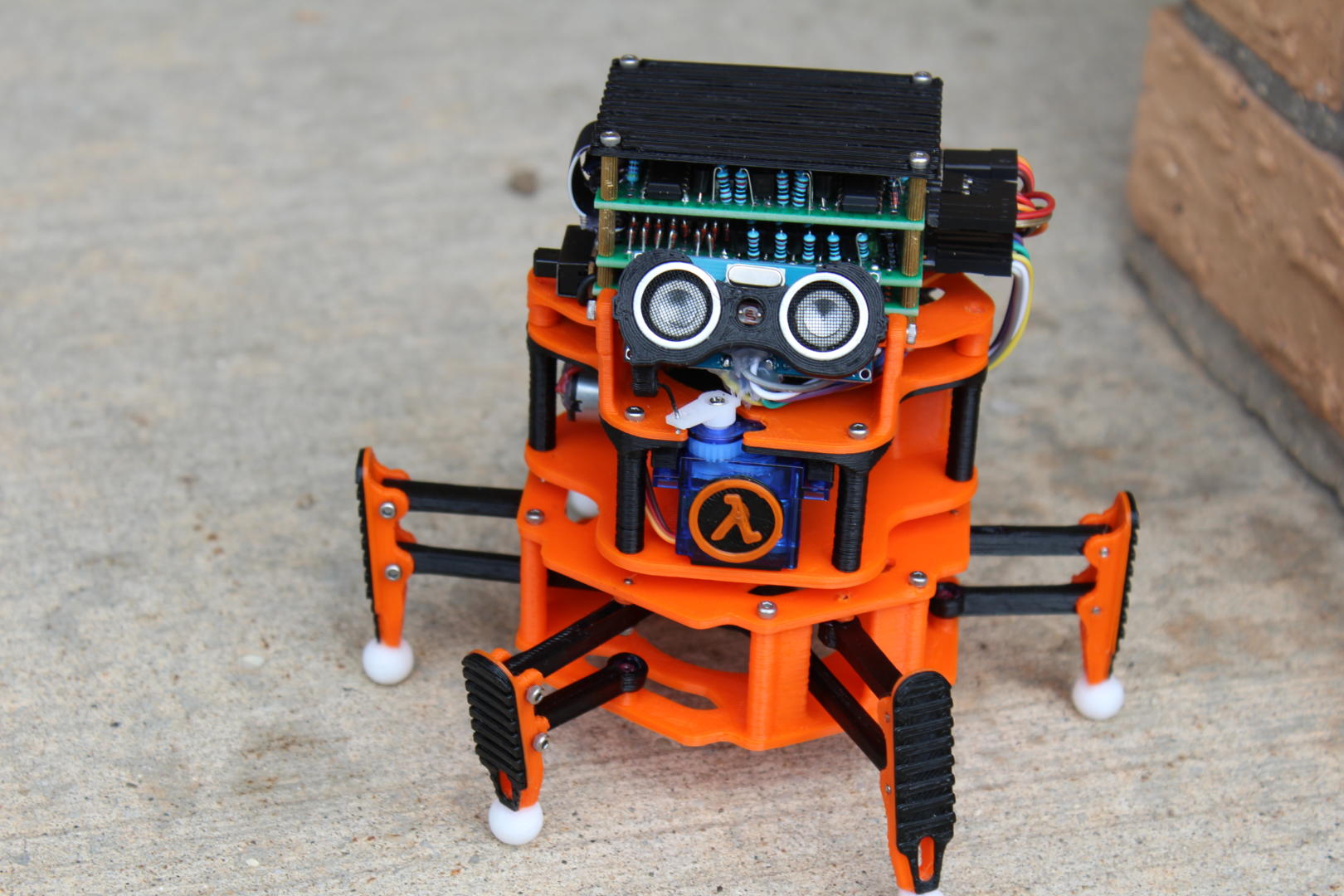
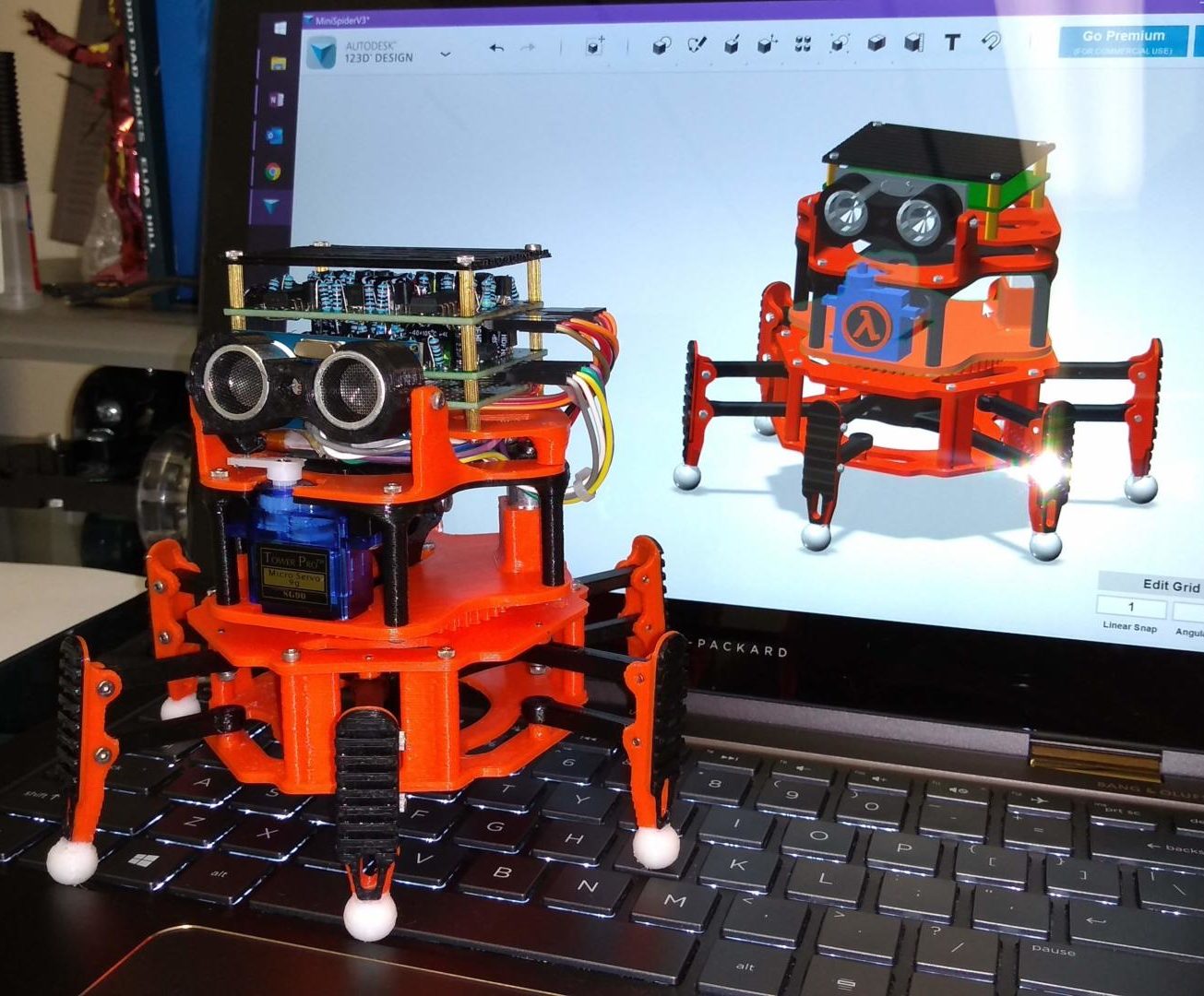
The Pilot Hobbies Pathfinder Mini is an easy to control 6-legged walker, which only requires two motors to allow walking in all 360 degrees, plus a servo for head tilt. The Pathfinder Mini has been designed to be a great introductory educational or learning platform, allowing the creator to focus more on problem solving, sensors, and functional programming of the robot, without the headache of managing multiple servos per leg or complex inverse kinematics equations.
Due to its simple nature, this robot lends itself well to not only microprocessor-based circuits, but also analog circuits and discrete logic gates. My personal build uses a BEAM Robotics style analog circuit, with 555 timers and transistor logic, for all its functions.
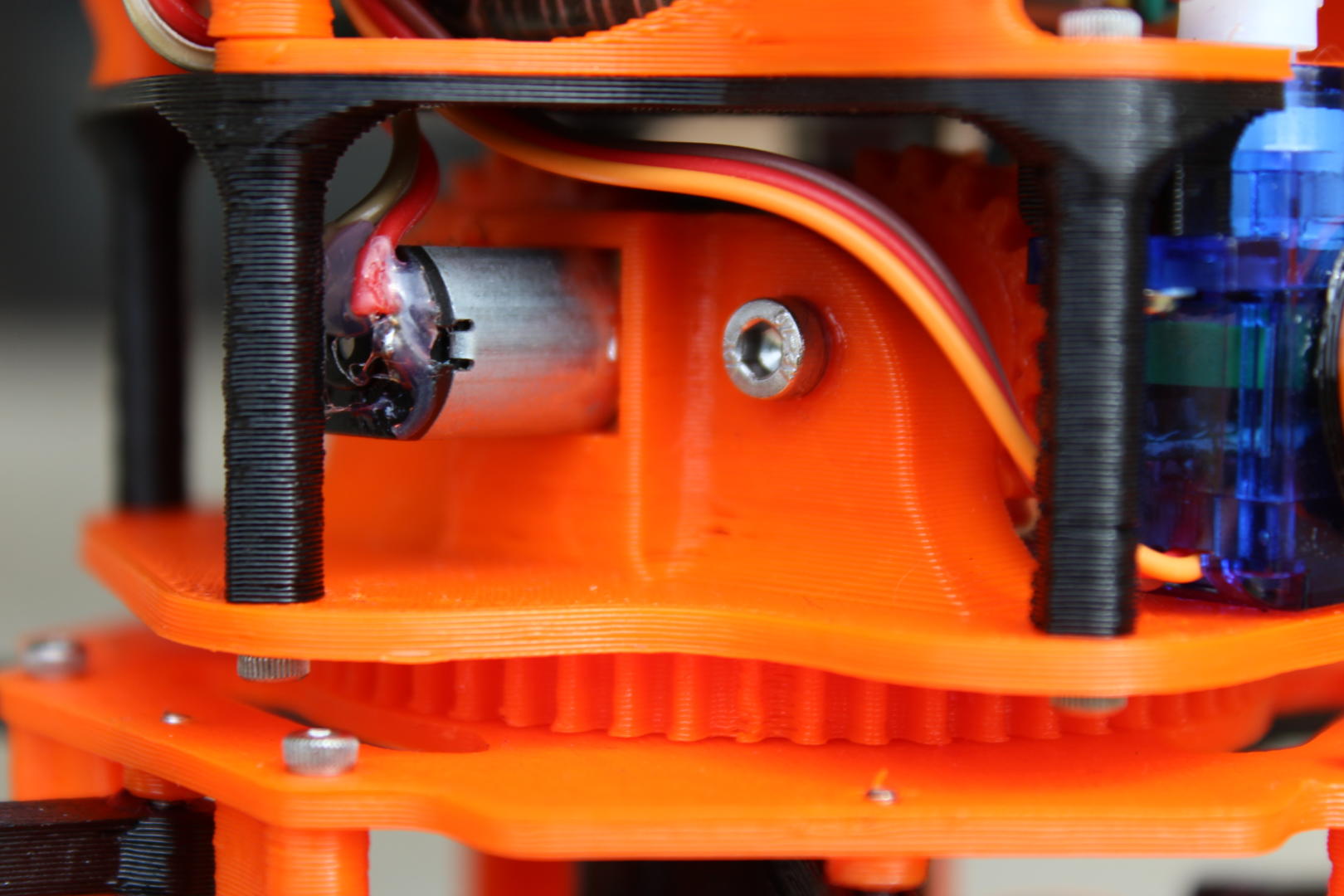
A single N20 Gear-Motor drives the walking mechanism, while a second N20 Gear-Motor rotates the head and drive assembly. This allows extremely easy control, without complicated walking code or servo control. Head panning and tilting is also simple to accomplish for environmental scanning and awareness, with only a single servo controlling head tilt, and panning sharing the same motor control as walking direction.
Leg geometries have been tuned to provide optimal traction and minimal slip between legs, making walking efficient. The head is designed to fit an ultrasonic sensor, and is positioned high above everything, ensuring good readings without interference from the ground or mechanical components.
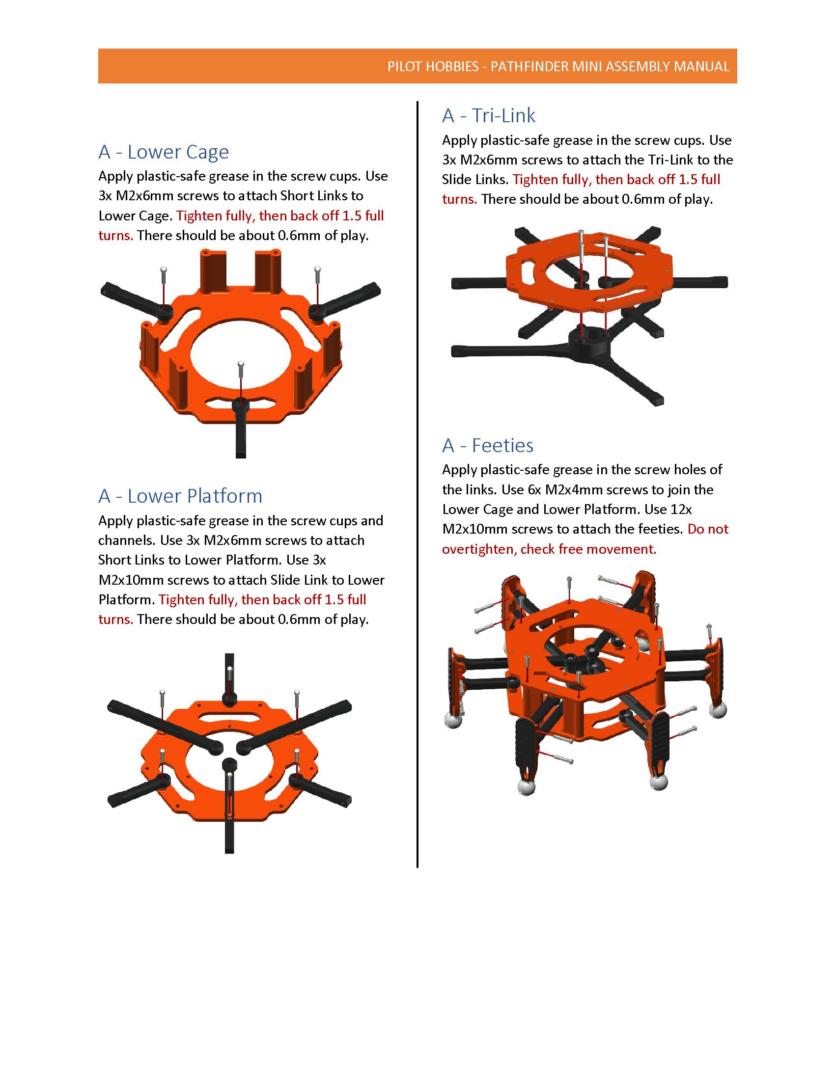
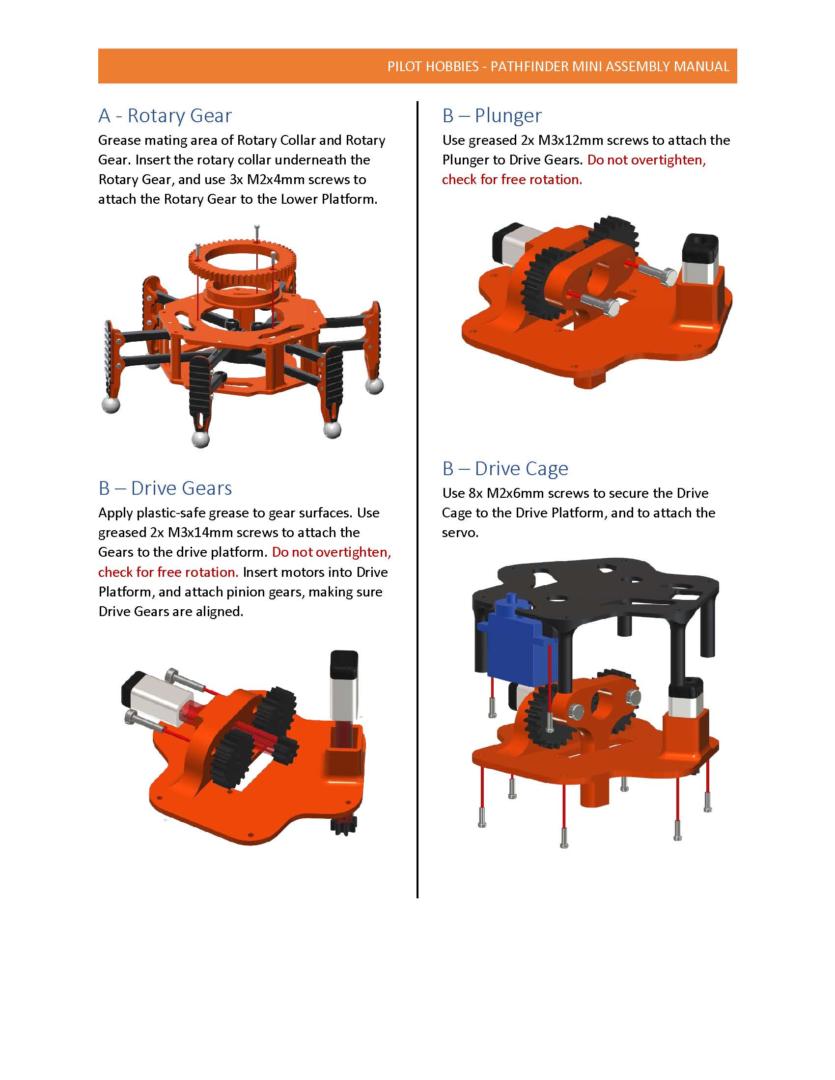
Includes step-by-step full-color PDF manual. Schematics from the robot in the video are also included, if you wish to replicate the circuit.
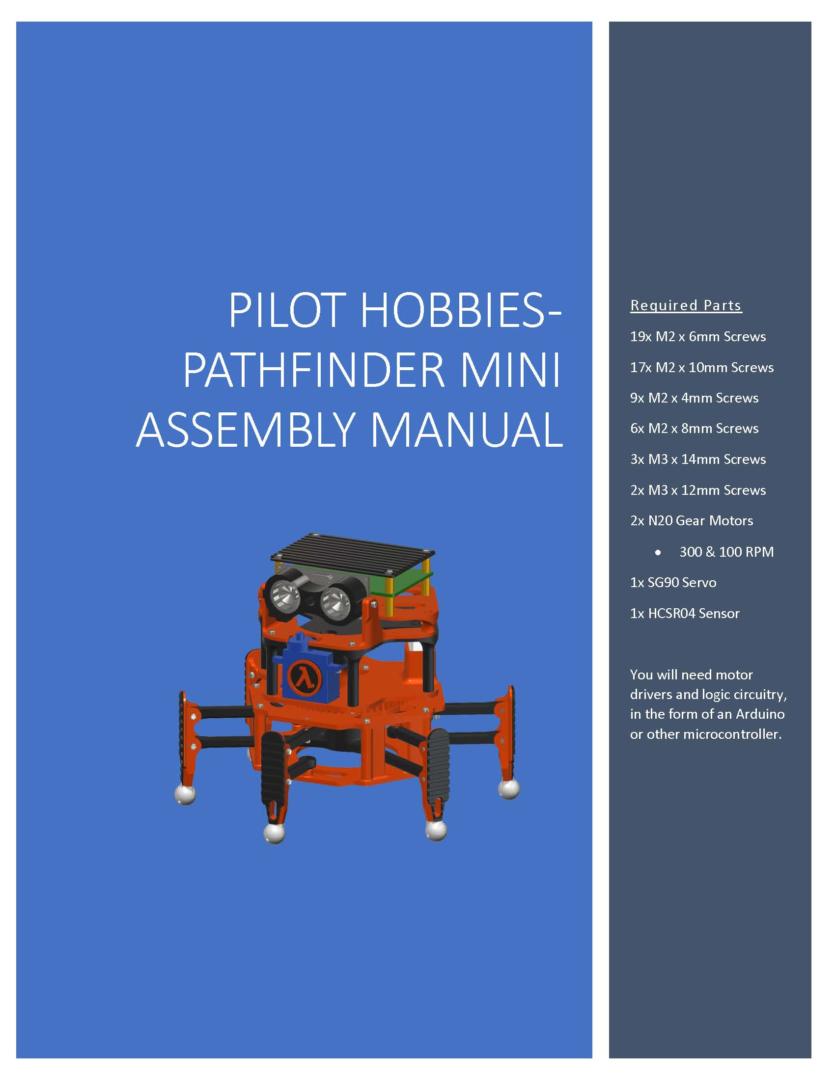
Required Parts for Build:
- Microcontroller & Motor Controller, or DIY Circuits
- 2x N20 Gear Motor Shown in Video as: 300rpm drive – 60rpm steer
- 1x TowerPro 9g Servo
- 1x HCSR04 Sensor
- Screws
- 31x M2 x 6mm Screws
- 17x M2 x 10mm Screws
- 9x M2 x 4mm Screws
- 6x M2 x 8mm Screws
- 3x M3 x 14mm Screws
- 2x M3 x 12mm Screws
- 6x 8mmOD x 3mm ID x 4mm Ball Bearings

Reviews
There are no reviews yet.